This guide will walk you through the CANbus wiring and setup that is specific to the Mellow UTOC-3 CANbus adapter. Please read through our CANbus guide for additional information on CANbus.
To mount your UTOC-3, we recommend this mount from Electroleon in the Voron User Mod github. You will need an additional PCB DIN Clip as well.
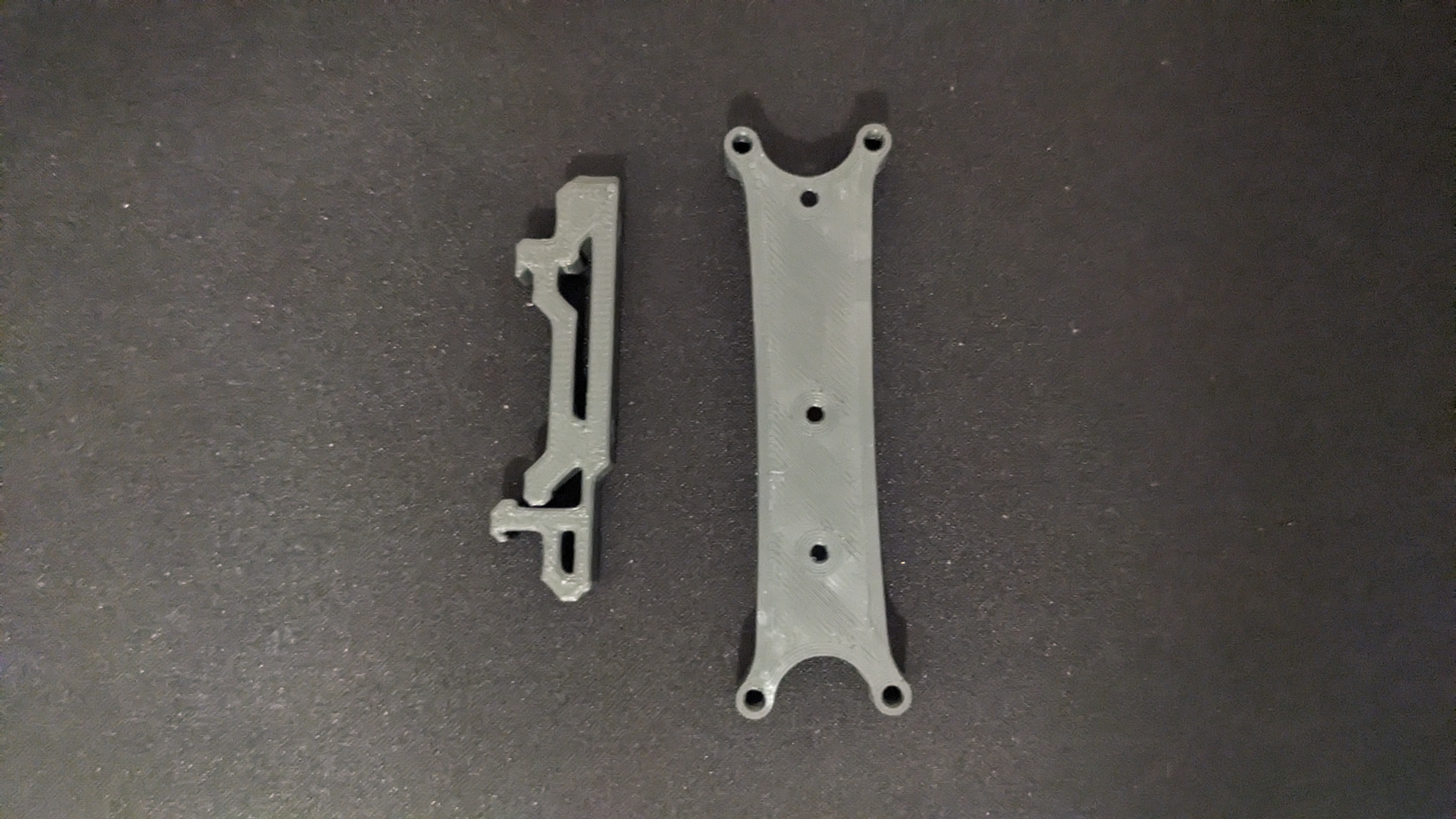
First mount the UTOC-3 mount to the DIN clip first using M2 self tapping screws.
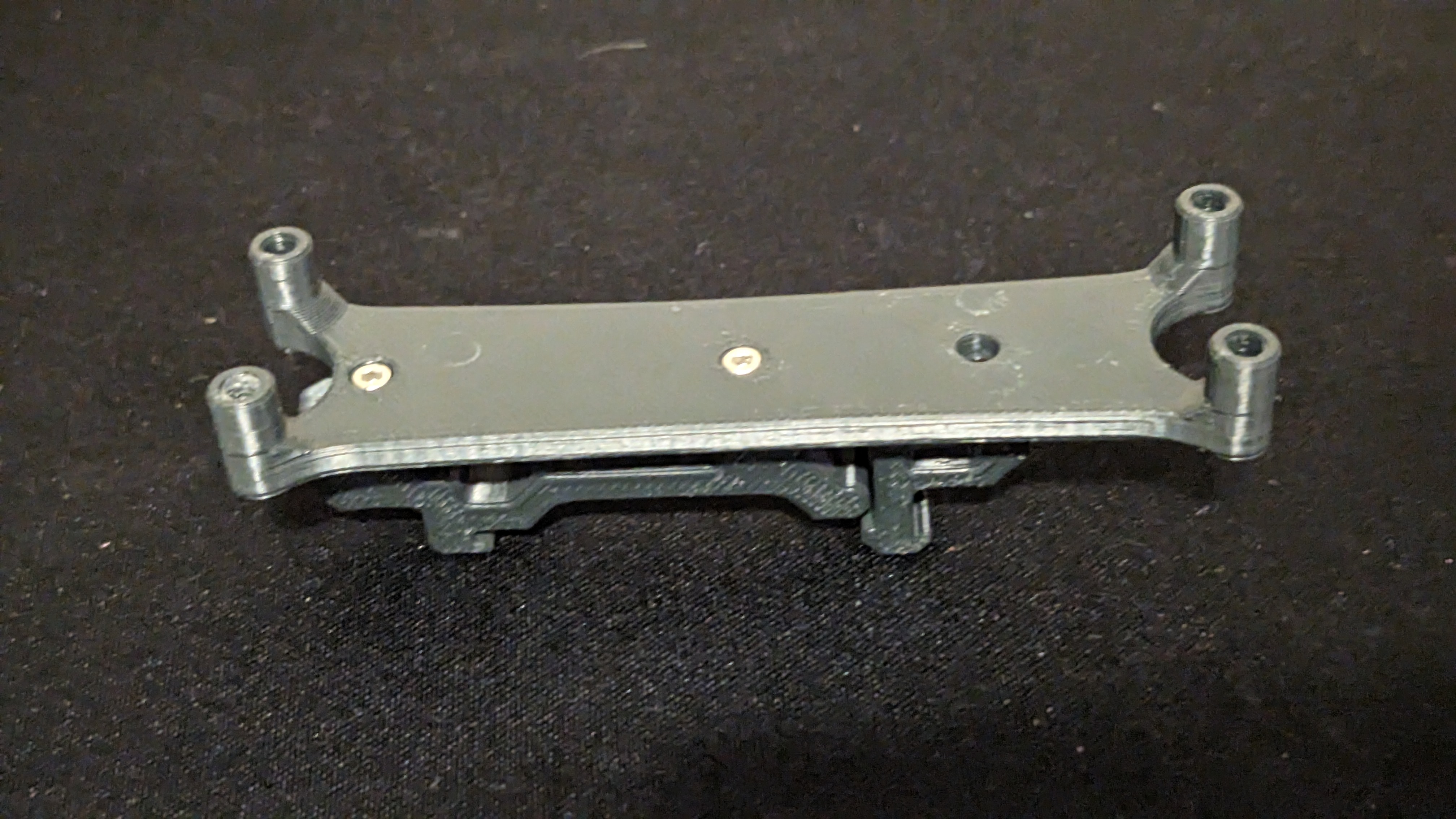
Then secure the UTOC-3 to the mount with an M3x6 BHCS.
¶ Connecting your UTOC-3
Once you have mounted your UTOC-3, simply connect the UTOC-3 to your Raspberry Pi using the USB-C port at the end.
Then you can power up your printer and start the initial configuration.
The first step is to SSH into your Pi and add the CAN adapter as a network interface. First let's confirm the UTOC-3 is being seen by your Pi, by running lsusb

Now you can add the interface, you need to run this command as admin, so you will use sudo, which will prompt for your password.
sudo nano /etc/network/interfaces.d/can0 Then, add the following…
allow-hotplug can0
iface can0 can static
bitrate 1000000
up ip link set can0 txqueuelen 1024And save the file with Shift-O and Shift-X to close.
Now you can reboot your pi (sudo reboot), and once you log back in, you should be able to see the Can Adapter as a network interface…
ifconfig can0

Once you have your CAN adapter showing up, you can move on to connecting your CAN devices.
¶ CANbus Wiring
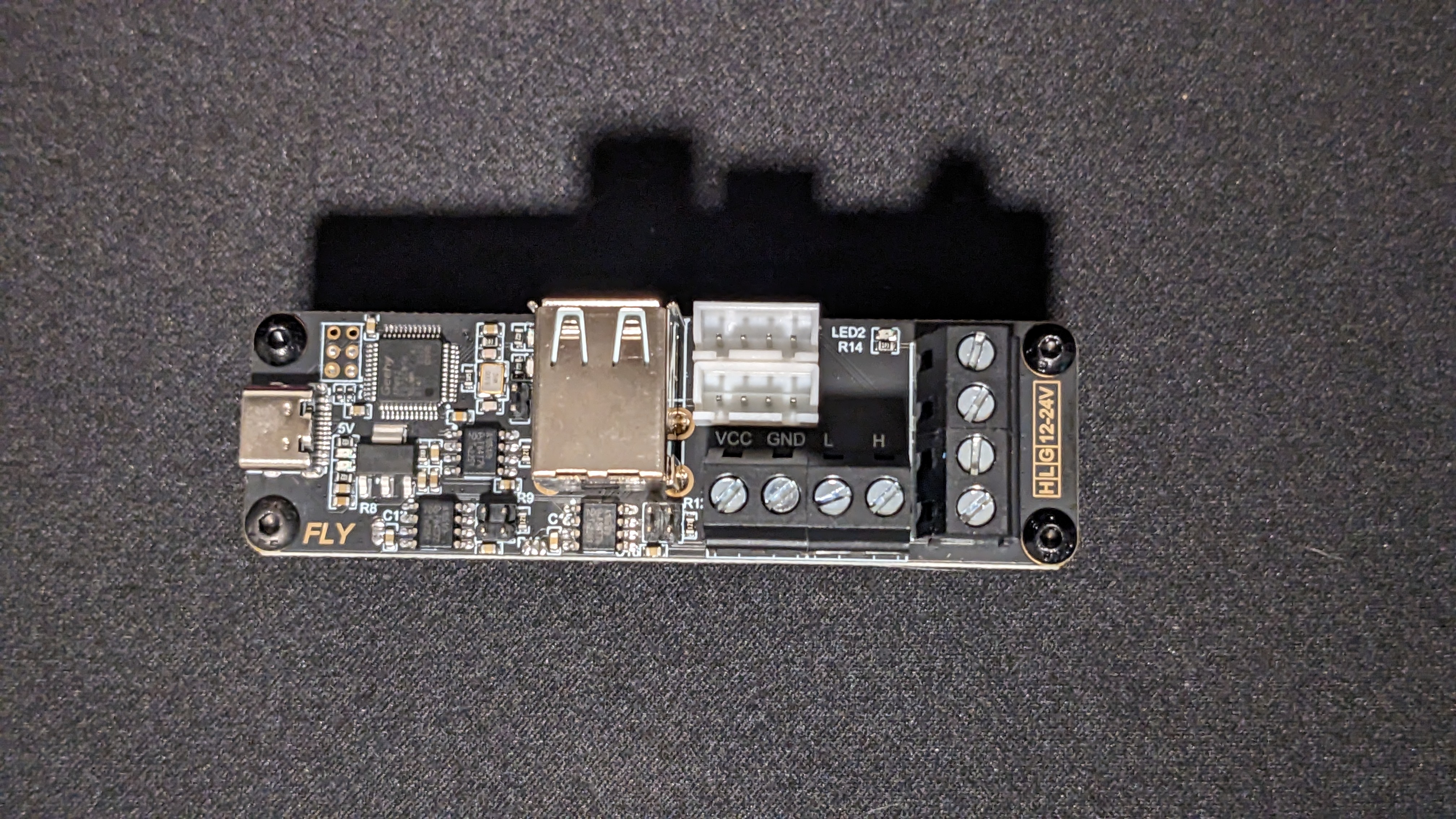
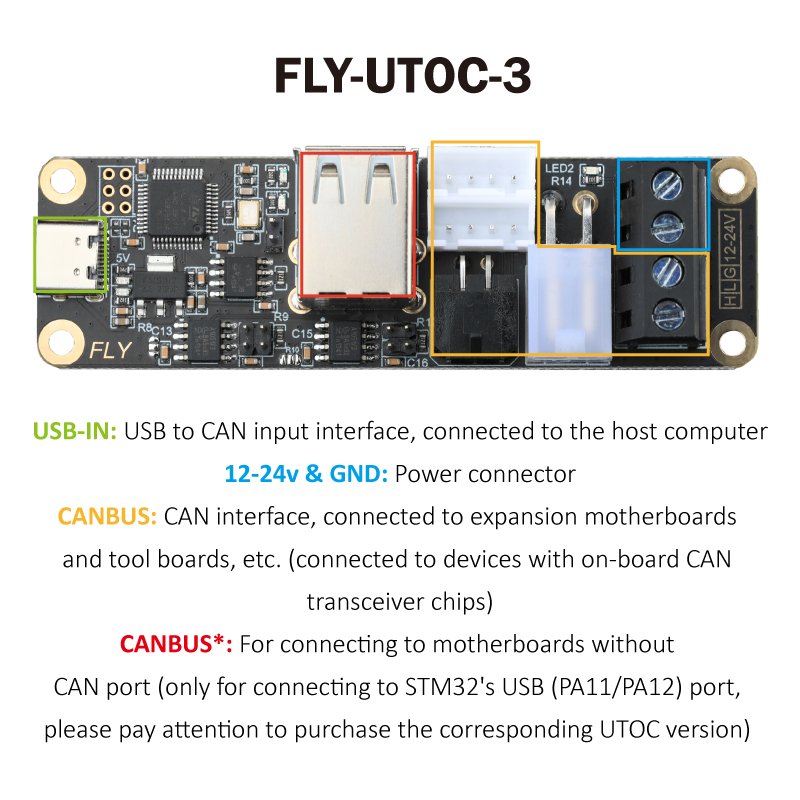
Here is the board diagram from the Mellow page.
And here is the pin-out diagram.
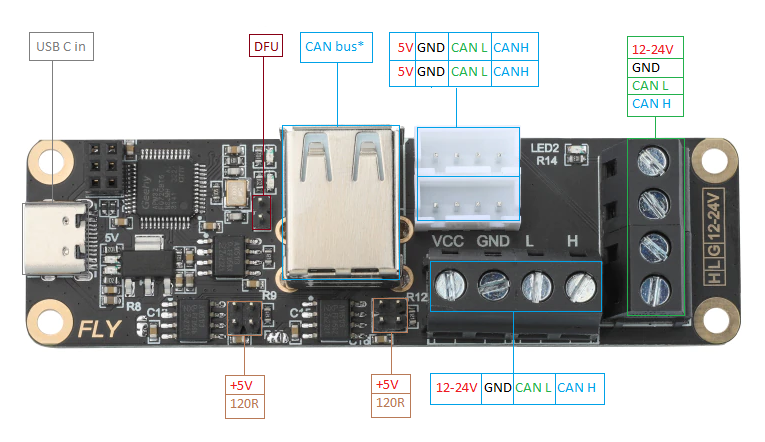
You can use either the JST or the Terminal block to connect to your toolhead board. Here is the breakout for the connector options.
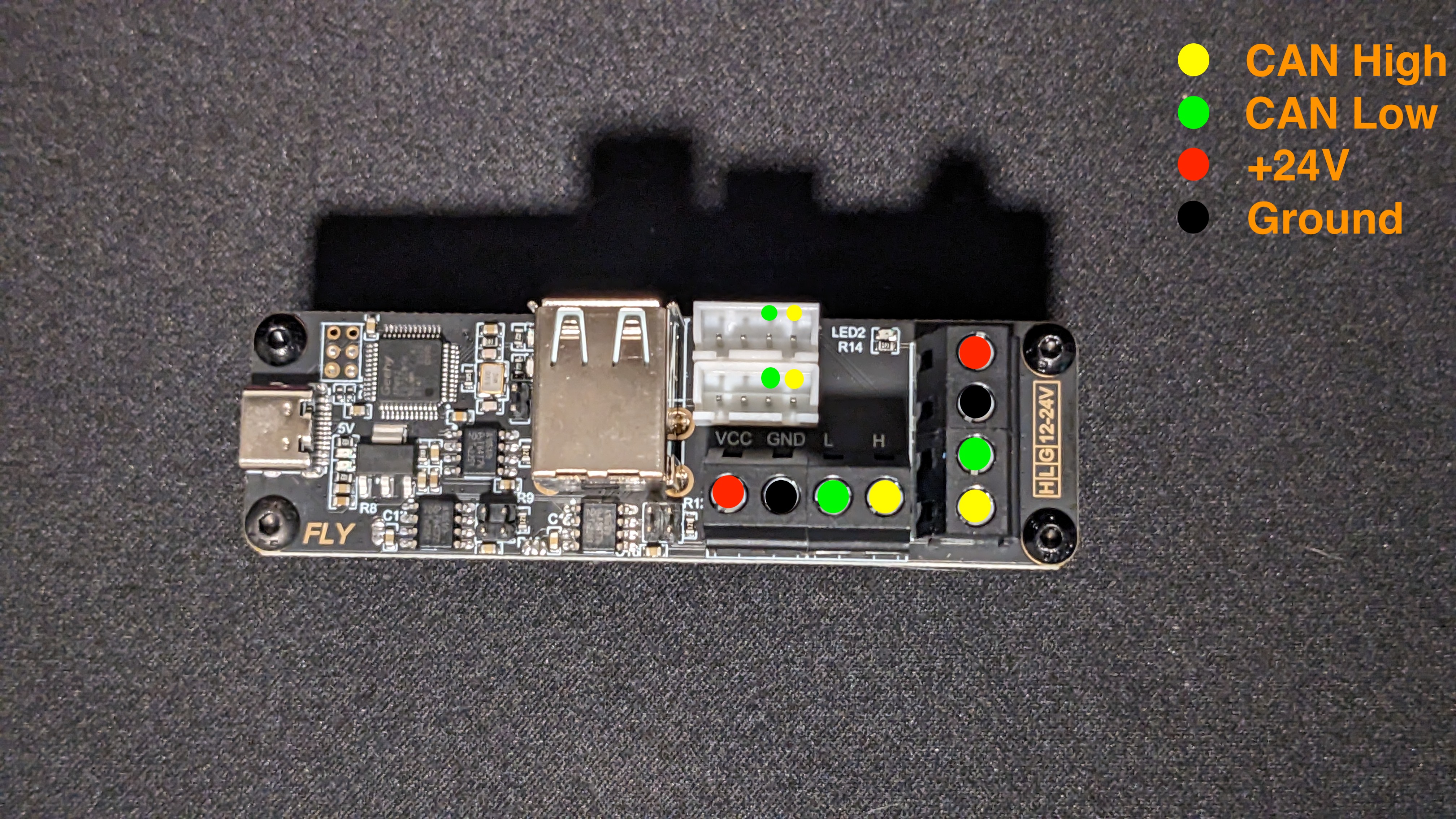
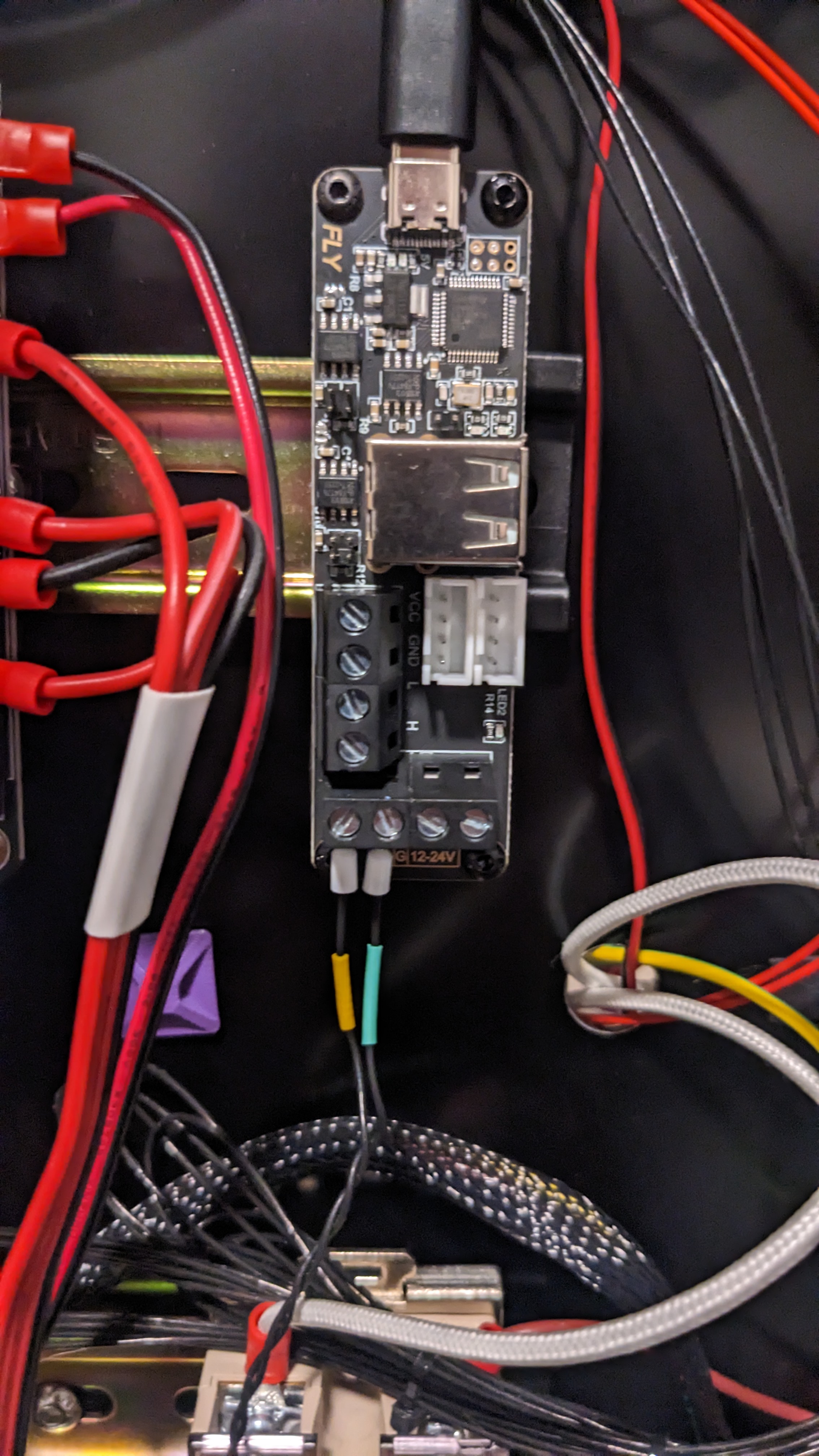
If you decide to provide 24V power to the UTOC-3 via the lower terminal block, you can then feed power out to the CAN Devices via the right terminal block +24V/GRD pins.
Our Linneo XT30 CAN Harness uses the terminal connections, but pulls power for the toolhead directly from the PSU. Here is how that would be wired.
If you choose to use the JST connectors, you just need to terminate your connectors appropriately.
Once you have finished your CANbus wiring, you should be able to query any CANbus devices with the following command.
python3 CanBoot/scripts/flash_can.py -i can0 -q
Found canbus_uuid=dc930e527336, Application: Klipper
Total 1 uuids foundNow you can continue on configuring your CANbus devices. If you are using a Mellow SB2040, you can find our guide here.